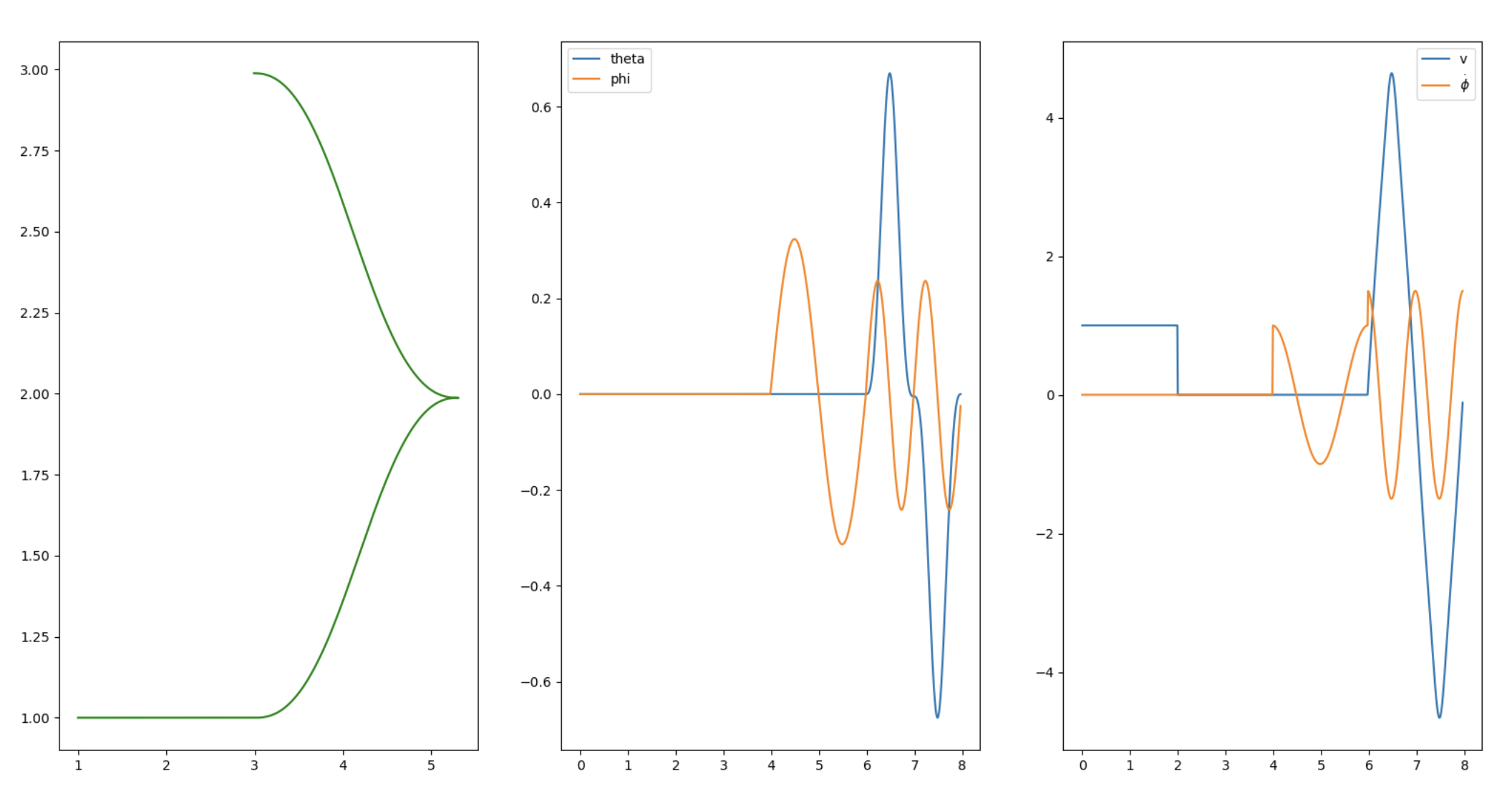
Parallel Parking Path from (1, 1) to (3,3)
This project implemented three different methods of path planning to parallel park a bicycle model-based car:
- RRT*: Standard random sampling-based algorithm for path planning, used motion primitives of vehicle movements based on the bicycle model. Able to plan around obstacles modeled as circles
- Optimization: Implemented using the FATROP solver in CasADi, with a banded structure for fast solve times, also based on the bicycle model, problem structured to minimize time based on vehicle constraints.
Also able to plan around obstacles modeled as circles
- Sinusoid: Based on this
paper
written by my robotics professor (Shankar Sastry)!
The optimization and RRT planners are capable of handling obstacles modeled as circles!
I also wrote a paper on the optimization method for my robotics class, which I've attached below: