
Daniel Municio
Autonomous Software Lead - Formula Electric at Berkeley
Check Out My Latest Projects! (More in Projects tab)
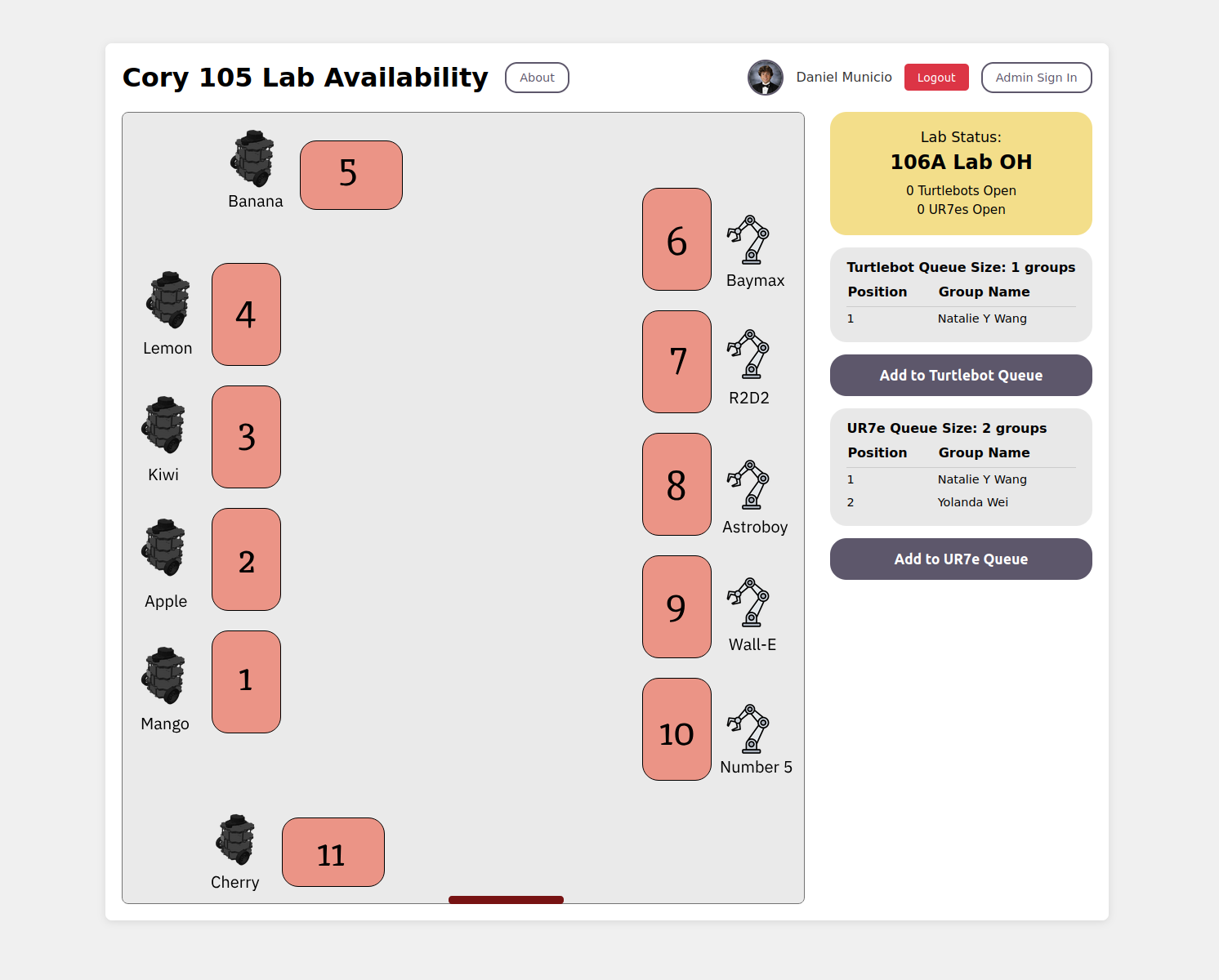
Cory 105 Lab Availability System
Real-time lab station monitoring with smart queue management for UC Berkeley's EECS 106A/B. Features Google OAuth, email notifications when stations open, and an admin dashboard for course staff.
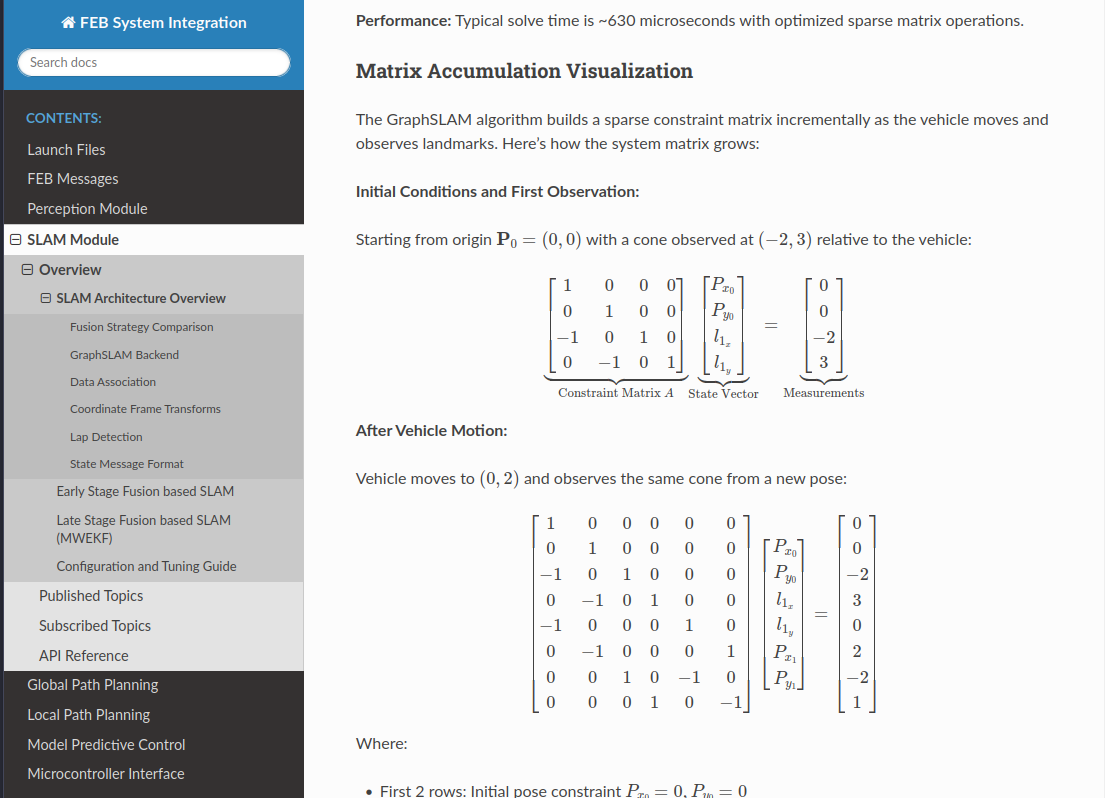
Formula Electric Berkeley 2025 Autonomous System Documentation
Complete technical documentation for FEB's autonomous racing pipeline, including perception, SLAM, path planning, and MPC control systems.
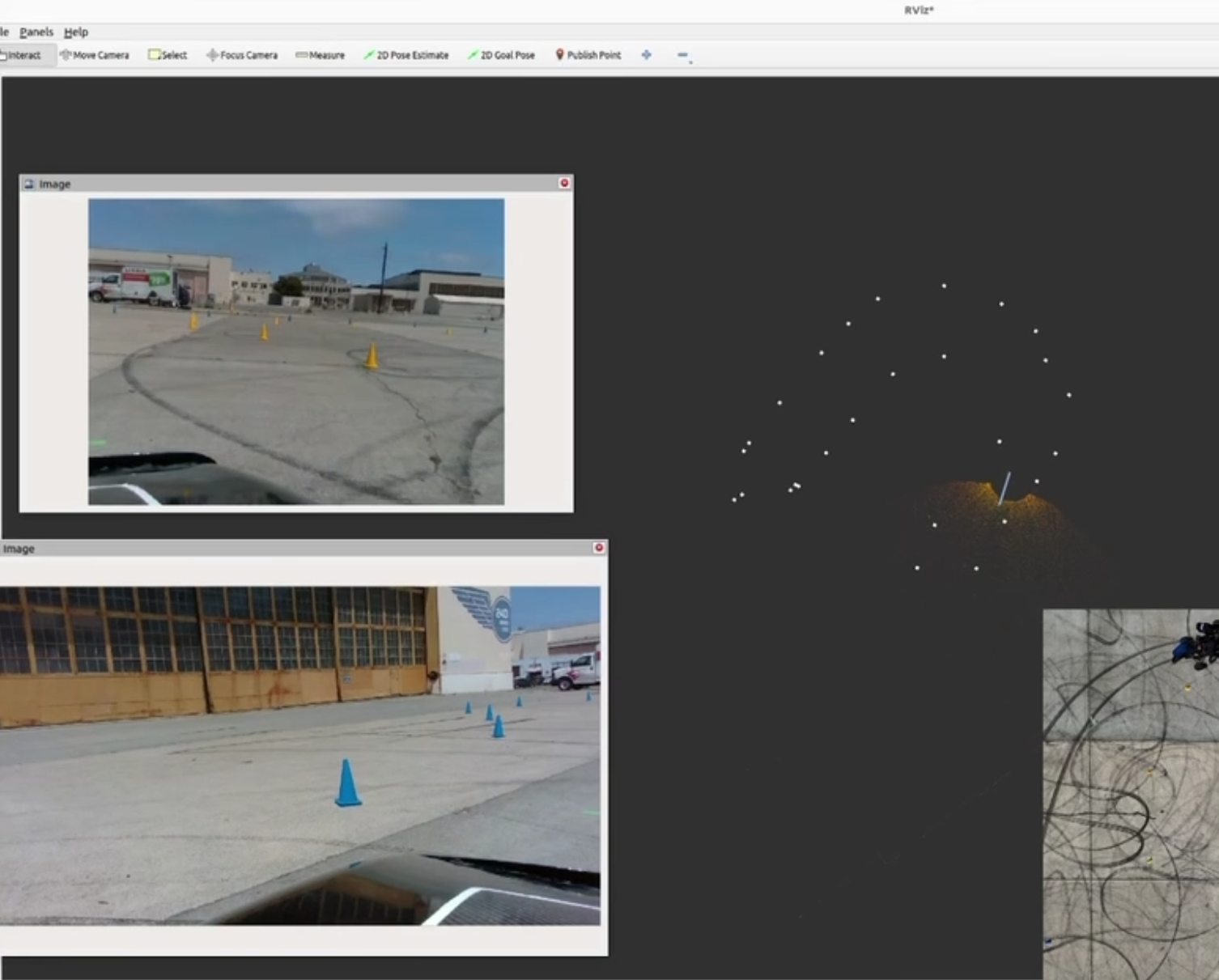
Live SLAM Demo on Formula Electric 2025 Car
Demonstrating functionality and robustness of SLAM and Perception Algorithms for Autonomous Car. Full pipeline testing starts soon!
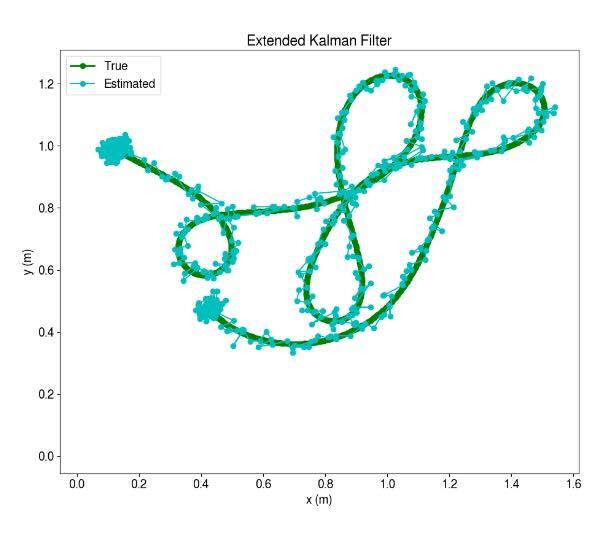
Extended Kalman Filter for Planar Quadrotor and Turtlebot
Implemented an EKF on a turtlebot using the unicycle model, and tested on real life hardware. Also implemented on a planar quadrotor in simulation.
Path Planning for Parallel Parking
Implemented optimization, rrt, and sinusoidal path planners for parallel parking.